|
vrpRouting
0.3
|
|
vrpRouting
0.3
|
#include <stddef.h>
Go to the source code of this file.
Typedefs | |
| typedef struct CompatibleVehicles_rt | CompatibleVehicles_rt |
| typedef struct Matrix_cell_t | Matrix_cell_t |
| typedef struct PickDeliveryOrders_t | PickDeliveryOrders_t |
| typedef struct Time_multipliers_t | Time_multipliers_t |
| typedef struct Vehicle_t | Vehicle_t |
Functions | |
| void | do_compatibleVehicles (PickDeliveryOrders_t customers_arr[], size_t total_customers, Vehicle_t *vehicles_arr, size_t total_vehicles, Matrix_cell_t *matrix_cells_arr, size_t total_cells, Time_multipliers_t *multipliers_arr, size_t total_multipliers, double factor, CompatibleVehicles_rt **return_tuples, size_t *return_count, char **log_msg, char **notice_msg, char **err_msg) |
| Driver for processing a "compatible vehicles" problem. More... | |
| typedef struct CompatibleVehicles_rt CompatibleVehicles_rt |
Definition at line 46 of file compatibleVehicles_driver.h.
| typedef struct Matrix_cell_t Matrix_cell_t |
Definition at line 45 of file compatibleVehicles_driver.h.
| typedef struct PickDeliveryOrders_t PickDeliveryOrders_t |
Definition at line 42 of file compatibleVehicles_driver.h.
| typedef struct Time_multipliers_t Time_multipliers_t |
Definition at line 43 of file compatibleVehicles_driver.h.
Definition at line 44 of file compatibleVehicles_driver.h.
| void do_compatibleVehicles | ( | PickDeliveryOrders_t | customers_arr[], |
| size_t | total_customers, | ||
| Vehicle_t * | vehicles_arr, | ||
| size_t | total_vehicles, | ||
| Matrix_cell_t * | matrix_cells_arr, | ||
| size_t | total_cells, | ||
| Time_multipliers_t * | multipliers_arr, | ||
| size_t | total_multipliers, | ||
| double | factor, | ||
| CompatibleVehicles_rt ** | return_tuples, | ||
| size_t * | return_count, | ||
| char ** | log_msg, | ||
| char ** | notice_msg, | ||
| char ** | err_msg | ||
| ) |
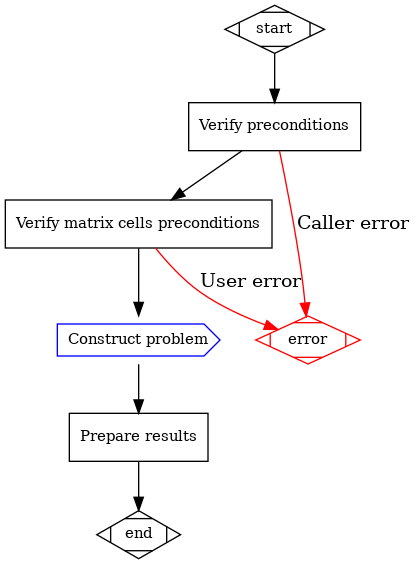
Driver for processing a "compatible vehicles" problem.
| [in] | customers_arr | A C Array of pickup and dropoff orders |
| [in] | total_customers | size of the customers_arr |
| [in] | vehicles_arr | A C Array of vehicles |
| [in] | total_vehicles | size of the vehicles_arr |
| [in] | matrix_cells_arr | A C Array of the (time) matrix cells |
| [in] | total_cells | size of the matrix_cells_arr |
| [in] | multipliers_arr | A C Array of the multipliers |
| [in] | total_multipliers | size of the multipliers_arr |
| [in] | factor | A global multiplier for the (time) matrix cells |
| [out] | return_tuples | C array of contents to be returned to postgres |
| [out] | return_count | number of tuples returned |
| [out] | log_msg | special log message pointer |
| [out] | notice_msg | special message pointer to be returned as NOTICE |
| [out] | err_msg | special message pointer to be returned as ERROR |
Definition at line 98 of file compatibleVehicles_driver.cpp.
References vrprouting::Pgr_messages::clear(), PickDeliveryOrders_t::deliver_node_id, Vehicle_t::end_node_id, vrprouting::base::Base_Matrix::fix_triangle_inequality(), vrprouting::Pgr_messages::get_error(), vrprouting::Pgr_messages::get_log(), vrprouting::problem::PickDeliver::get_pg_compatibleVehicles(), vrprouting::base::Base_Matrix::has_no_infinity(), vrprouting::problem::PickDeliver::msg, vrprouting::base::Base_Matrix::obeys_triangle_inequality(), pgassert, pgr_alloc(), pgr_msg(), PickDeliveryOrders_t::pick_node_id, Vehicle_t::start_node_id, and AssertFailedException::what().
Referenced by process().
 1.8.17
1.8.17