|
vrpRouting
0.3
|
|
vrpRouting
0.3
|
the pick deliver problem More...
#include "pickDeliver.h"
Public Member Functions | |
| PickDeliver (PickDeliveryOrders_t *p_orders, size_t p_orders_size, Vehicle_t *p_vehicles, size_t p_vehicles_size, const Matrix &p_cost_matrix) | |
| General Constructor. More... | |
| PickDeliver (PickDeliveryOrders_t *p_orders, size_t p_orders_size, Vehicle_t *p_vehicles, size_t p_vehicles_size, std::vector< Short_vehicle > new_stops, const Matrix &p_cost_matrix) | |
| Override stops constructor. More... | |
| virtual | ~PickDeliver ()=default |
| void | add_node (const Vehicle_node &node) |
| add a node to the set of nodes More... | |
| std::vector< CompatibleVehicles_rt > | get_pg_compatibleVehicles () const |
| get the vehicles compatibility results as C++ container More... | |
| size_t & | node_id () |
| const Orders & | orders () |
| const Matrix & | time_matrix () |
| const Fleet & | vehicles () |
Public Attributes | |
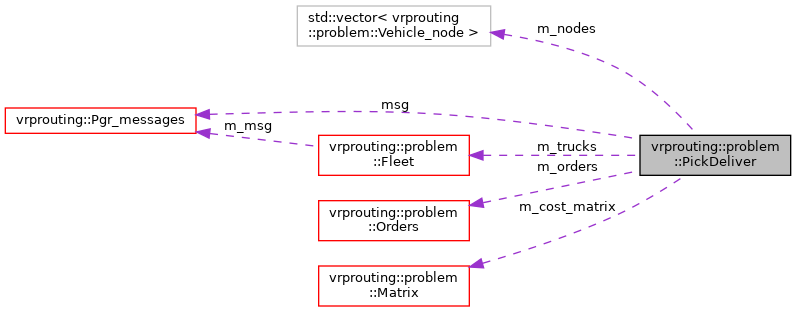
| const Matrix & | m_cost_matrix |
| the cost matrix More... | |
| Pgr_messages | msg |
| message controller for all classes More... | |
Protected Attributes | |
| Orders | m_orders |
| the set of orders More... | |
| Fleet | m_trucks |
| the set of vehicles More... | |
Private Attributes | |
| size_t | m_node_id = 0 |
| used to keep track of the next index the node gets More... | |
| std::vector< Vehicle_node > | m_nodes { } |
| set of vehicle nodes More... | |
the pick deliver problem
Definition at line 50 of file pickDeliver.h.
|
inline |
General Constructor.
Definition at line 53 of file pickDeliver.h.
References vrprouting::problem::Fleet::clean(), vrprouting::Pgr_messages::get_error(), m_orders, m_trucks, msg, vrprouting::problem::Orders::set_compatibles(), and vrprouting::problem::Fleet::set_compatibles().
|
inline |
Override stops constructor.
Definition at line 67 of file pickDeliver.h.
References vrprouting::problem::Fleet::clean(), vrprouting::Pgr_messages::get_error(), m_orders, m_trucks, msg, vrprouting::problem::Orders::set_compatibles(), and vrprouting::problem::Fleet::set_compatibles().
|
virtualdefault |
|
inline |
|
inline |
get the vehicles compatibility results as C++ container
Definition at line 84 of file pickDeliver.h.
References m_orders, and m_trucks.
Referenced by do_compatibleVehicles().
|
inline |
|
inline |
|
inline |
|
inline |
| const Matrix& vrprouting::problem::PickDeliver::m_cost_matrix |
|
private |
used to keep track of the next index the node gets
The first one will get 0
Definition at line 118 of file pickDeliver.h.
Referenced by node_id().
|
private |
set of vehicle nodes
Definition at line 124 of file pickDeliver.h.
Referenced by add_node().
|
protected |
the set of orders
Definition at line 128 of file pickDeliver.h.
Referenced by get_pg_compatibleVehicles(), orders(), and PickDeliver().
|
protected |
the set of vehicles
Definition at line 132 of file pickDeliver.h.
Referenced by get_pg_compatibleVehicles(), PickDeliver(), and vehicles().
| Pgr_messages vrprouting::problem::PickDeliver::msg |
message controller for all classes
Definition at line 99 of file pickDeliver.h.
Referenced by do_compatibleVehicles(), do_pgr_pickDeliver(), do_pgr_pickDeliverEuclidean(), do_pickDeliver(), anonymous_namespace{optimize_driver.cpp}::one_processing(), and PickDeliver().
 1.8.17
1.8.17